




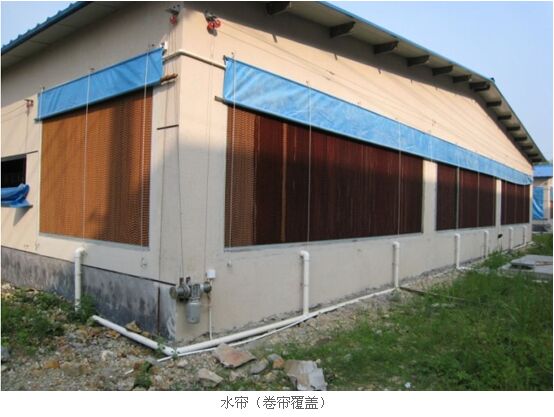



锋速达通风降温系统
电 话:0573-83418060>
传 真:0573-83418060
联系人
售前咨询:15068216608
技术指导:18858318765
售后服务:15821073963
地 址:浙江省嘉兴市南湖区
通风换气次数_离心风机变型设计电压调节器的功用 单双盘转子稳态
离心通风机变型设计
现有风机中有很多性能优良,湿帘空调,但由于用户要求的多样性,已有产品中往往选不到合适的风机和模化设计对象。重新设计新产品则需要气动计算、模型试验、工艺设计,模具制造等一系列复杂过程,成本高、周期长。这时可采用变型设计,即仅改变原有风机个别几何参数来满足设计要求。变型设计有试验数据和实际产品为依据,设计计算可靠,不必进行模型试验;还可利用现有图纸资料、模具工装,降低了成本,缩短了设计制造周期。
变型设计原理
当选型设计和模化设计都不能满足设计要求时,选用比转速相差不多,性能较好的离心风机进行变型设计。在变型量控制在一定范围内时,可以认为变型设计点的效率近似不变。变型设计方法主要有:①变叶轮宽度;②变叶片数;③变叶轮外径及出口安装角或叶片型线;④变叶片进口安装角。
一、变叶轮宽度
变叶轮宽度的变型设计方法,适用于风机满足用户提出的压力要求,而不满足流量要求。按设计要求的技术能数,计算出比转速后,选择与计算比转速接近,效率较高的风机,从其无因次性能曲线上找出变型工况点得到流量系数,按设计全压要求求得所需风机叶轮直径。依此为依据得到变型设计的模型风机。
作两点假设:①不考虑由于宽度变形而引起的轴向涡流变化;②不考虑由于宽度变化引起的附面层变化。
在此基础上,按下面两种情况进行变宽度计算:①满足进口速度三角形相似;②满足出口速度三角形相似。
宽度改变以后,全压可能会有所变化,因此要计算全压是否在设计压力允许波动范围。
二、变叶片数
变叶片数方法适用于风量满足用户要求,而风压不满足要求的情况,按满足风量要求,求得所需模型风机,并得到对应各几何参数(按比例常数求得)。变叶片数后,主要考虑滑移系数K发生变化,滑移系数K可按模型风机的实验结果和滑移系数的计算公式进行修正计算。
三、变叶轮出口参数或叶片型线
这一方法适用于模型风机满足全压或流量其中一个要求,而另一要求与模型风机参数相差不多的情况。通过改变叶轮出口几何参数或叶片型线来满足设计要求。有三种情况:①变叶轮外径叶片出口安装角β,不变叶片型线;②变叶轮外径,叶片型线,不变叶片出口安装角β;③变叶片出口安装角β,叶片型线,不变叶轮外径。
1、 先满足流量或全压要求得出模化风机;
2、 滑移系数的修正计算仍使用变叶片数时的计算方法;
3、 对计算结果进行验算。
四、变叶片进口参数
叶片进口参数同时影响着通风机的流量与全压,因此,不能先满足其中一个要求,经修正后满足另一要求,也就是说,不能先确定模型风机,只能是同时确定模型风机及变形后的叶片进口参数。
由于交流发电机的转子是由发动机驱动的,因此交流发电机转子的转速变化范围非常大,这样将引起发电机的输出电压发生较大变化,无法满足汽车用电设备的工作要求。为了满足用电设备恒定电压的要求,交流发电机必须配用电压调节器。
电压调节器功用:使交流发电机输出电压在发动机所有工况下基本保持恒定。
本文链接: 电压调节器的功用
锋速达是负压风机生产厂家|水帘生产厂家|环保空调生产厂家|屋顶风机厂家,下面锋速达和大家一起讨论: 上一篇: 开式凝结水盘设计调整 下一篇: 风机盘管的施工过程 发表评论 取消回复
转子稳态响应是在频率不变的不平衡激振力下产生的,而瞬态响应的激振力频率是时刻变化的。激振力的不同使得转子稳态和瞬态响应有很大的差别。因为转子系统存在阻尼,阻尼的滞后作用使得振幅响应滞后于不平衡激振力,激振力频率变化得越快,响应滞后得就越多[1]。
针对稳态响应和瞬态响应发展了两种平衡转子的方法——稳态平衡法和瞬态动平衡法。稳态平衡法比较简单可行,但对柔性转子平衡转速在临界转速附近,平衡时危险性很大;而瞬态动平衡则可以很大的加速度迅速跨过临界转速,使振幅大幅度下降,减小平衡的危险性,但瞬态动平衡比稳态平衡难度大[2]。国外 Gregory L.Reed 曾做过加速度大小对转子启动过程振幅的影响分析[3],为了进一步了解稳态响应和瞬态响应振幅及临界转速的差别,进而确定转子动平衡的平衡方法,分析加速度对转子瞬态响应的影响规律。
1 Jeffcott转子稳态和瞬态响应对比分析 转子的物理模型见图1,具体尺寸参数:轴的直径d=1.7cm,跨距52cm,盘的直径D=12cm,厚5cm,质量m=4.7kg,不平衡量me=1.41×10-5kg·m,转子系统在盘A-A截面处的刚度系数为3.3×105N/m,阻尼Ce=20N·s/m。
通过matlab中的simulink动态仿真模块对上式方程组进行数值求解,得到不同加速度下转子系统的振幅响应[5]。令自转角加速度й=0 ,则可得到转子系统在某一转速下的稳态响应。因此先令初始自转角加速度й=35rad/s2,计算得出转子系统的瞬态响应,然后再令й=0 ,取不同的自转角速度й,得出不同自转角速度下的转子系统的稳态响应,将这些数据在同一个图上表示出来,即能反映出 Jeffcott 转子稳态响应和瞬态响应的差别。
Jeffcott 转子稳态响应和瞬态响应的对比分析见图2。分析图2得出:随着加速度a的增大,屋顶风机厂家,转子的振幅下降,临界转速增加;转子系统的稳态响应振幅在临界转速附近要明显高于瞬态响应,但在转速低于转子系统临界转速的80%区域内,稳态响应和瞬态响应是相同的,此时可采取稳态平衡法,相反在高于临界转速80%的区域则应采用瞬态动平衡法;转子在以角加速度为35rad/s2的加速过程中,玻璃钢屋顶风机,最大振幅为1.165×10-4m ,对应转速为 2631r/min,而稳态响应最大振幅为1.8684×10-4m ,对应转速为2531r/min。计算后知稳态响应的峰值高出了瞬态响应的60%,瞬态响应出现峰值的转速比稳态响应滞后了100r/min。因此对于一个不平衡的转子系统长期运行于临界转速附近是非常危险的。对于需要工作在高于临界转速的转子系统,必须以很大的加速度迅速跨过临界转速区域,以防转子系统在临界转速附近因振幅过大而直接损坏,造成不必要的损失。
2 单盘悬臂转子稳态和瞬态响应对比分析
转子的物理模型见图3,L1=0.24m,L2=0.96m,L3=0.05m;k1、k2分别为两支撑的刚度,k1=1×106N/m,k2=1×108N/m;轮盘质量m=20kg,直径D=0.5m, 偏心矩e=9.6×10-4m ,盘的自转角加速度a=50rad/s2;轴的直径d=3cm。为便于用传递矩阵对其进行研究,在轴上做出了6个截面。
利用传递矩阵法推导出单盘悬臂转子的运动微分方程为
如同Jeffcott转子一样,设定角加速度a=0rad/s2,取不同自转角速度30rad/s、50rad/s、70rad/s、100rad/s、120rad/s等值,通过求解上式方程组得出不同转速下悬臂转子系统的稳态响应;再取a=50rad/s2,得出转子系统的瞬态响应。然后在一张图上画出稳态和瞬态的计算结果,见图4。
分析图4看出:随着加速度的增大,转子振幅减小,临界转速增加;单盘悬臂转子的稳态响应峰值在临界转速附近要明显高于瞬态响应;出现峰值时的转速,瞬态要滞后于稳态,且加速度越大,滞后的越多;当转速低于转子系统临界转速的70%时,稳态响应和瞬态响应是相同的。从图中还可以看出,转子在以角加速度为50rad/s2的加速过程中,振幅最大峰值为1.85×10-4m,对应的转速为1425r/min,而稳态响应的峰值为3.2514×10-4m ,对应的转速为1299r/min,计算后知稳态响应的峰值要高出瞬态响应的75.7%,瞬态响应出现峰值的转速滞后稳态响应126r/min。
3 双盘转子稳态和瞬态响应对比分析双盘转子的物理模型见图5,两盘的质量分别为m1=5kg,m2=10kg,两盘的直径分别为D1=0.2m,D2=0.4m,两盘的偏心距分别为e1=e2=2×10-5m,两盘处的阻尼分别为Ce1=100N·s/m、Ce2=100N.s/m,弹性支承的刚度分别为k1=k2=5.63×105N/m;各轴段的长度分别为L1=0.2m,L2=0.5m,L3=0.7m,L4=0.1m;各轴段的直径为D=0.03m;加速度为30rad/s2。
利用传递矩阵法得到上面双盘转子系统的运动微分方程为
上式中的各系数如下(A为1~4截面的传递矩阵,C为5~8截面的传递矩阵,B=CA):
双盘转子系统的运动微分方程明显要比单盘转子系统复杂得多,从4个方程变成了8个。利用matlab中的simulink动态仿真模块对该方程组进行求解,令角加速度й=0,取自转角速度分别为20rad/s、60rad/s、110rad/s、140rad/s、160rad/s等值,得出双盘转子系统的稳态响应。然后再令й=100rad/s2,求出转子系统的加速瞬态响应,最后将稳态和瞬态响应的结果绘于同一张图上,对它们进行比较,见图6和图7。
分析图6和图7知:双盘转子随着加速度的增大,两盘振幅减小,临界转速上升;由图上标出的数值看出,在一阶临界转速,1盘稳态响应的峰值高出瞬态响应的21%,2盘稳态响应的峰值高出瞬态响应的27%。1盘瞬态响应峰值出现的转速要滞后稳态响应161rad/s,2盘瞬态响应峰值出现的转速要滞后稳态响应151rad/s;在二阶临界转速,1盘稳态响应的峰值高出瞬态响应的11.2%,2盘稳态响应的峰值高出瞬态响应的7%,1盘瞬态响应峰值出现的转速要滞后稳态响应127rad/s,2盘瞬态响应峰值出现的转速要滞后稳态响应134rad/s。
4 结论通过上面对单双盘转子系统的各种模型的大量数值仿真得出:随着转子加速度的增大,转子振幅下降,临界转速上升;稳态响应峰值要大于瞬态响应;瞬态响应出现峰值的转速要滞后于稳态响应。
上述得出的结论与理论相符。因为当转子越过临界转速时,挠度要明显加大,轮盘质心的切线速度就会相应得到提高,致使转子的动能提高很多。这部分动能的增量是由外力矩做功获得的。因为旋转的轮盘在挠度增加时,要受到哥氏惯性力的作用,由其形成的阻力矩需由外力矩来克服,所以,外力矩消耗的功是用于转变成挠度增加所需要的动能。可见系统能量的增加是一种能量的积累过程,转子增速的快慢,将直接影响能量积累的时间,从而影响挠度的增加以及对应于挠度峰值的转速。如果提高转子增速的速率,使越过临界状态的时间相应缩短,那么,临界转速的挠度就会变小,其峰值也会滞后出现。而稳态响应则相当于加速无穷缓慢,使能量积累时间无限长,因而能量积聚的越多,振幅越大。
参 考 文 献[1] 顾家柳,等.转子动力学[M].国防工业出版社,1985.12.
[2] 钟一愕,何衍宗,王正,等.转子动力学[M].北京:清华大学出版社,1987.11.
[3] Gregory L.Reed Theoretical And Experimental Investigation Of The Response Of A Rotor Accelerating Through Critical Speed NAVAL POSTGRADUATE SCHOOL 1995.
[4] 和兴锁.理论力学[M]. 科学出版社 ,2005.6.
[5] 陈桂明,张明照,戚红雨,等.应用Matlab建模与仿真[M]. 科学出版社,2001.
日前在京与全球著名半导体供应商英飞凌签署核心技术变流器模块技术引进协议,该协议没有授权期限及生产配额的限制。业内分析人士认为,此举释放出金风科技在未来企业发展中的三大信号。
首先,变流器模块技术是影响直驱永磁风电机组低电压穿越和成本效益的核心系统,被认为是实现“电网友好型”风电的关键技术。金风科技董事长武钢说,近年来,电网对风电的发展提出更高的要求,金风科技引起核心技术旨在致力于“电网友好型”风电的发展方向。
其次,金风科技从2007年开始在英飞凌支持下自主研制变流器,此次签署技术协议后,金风科技从英飞凌获得“兆瓦级风力发电机组变流器模块”的国内生产权,其生产模块将应用到1 .5 MW和2.5MW风电机组中,并逐渐向3.0MW直驱机组扩展。这表明,随着国内风电机组大功率化趋势的加剧,金风科技开始加强对大功率直驱风机核心技术的掌控能力。
其三,据介绍,全功率变流器在风电机组核心技术部件总成本中占15%。金风科技引进英飞凌变流器模块技术并批量自产后,无疑将降低企业成本,提高市场竞争力。武钢表示,“这项技术引进及自产在带来显著成本效益的同时,还将有效确保变流器核心模块的即时供应,增强企业服务客户的能力。更重要的是,我们还能从中学习到以英飞凌为代表的先进德国生产工艺和质量控制经验,对提高公司整体生产管控水平大有裨益。”
锋速达负压风机-大北农集团巨农种猪示范基地风机设备水帘设备供应商!台湾九龙湾负压风机配件供应商! 主要产品猪舍通风降温,猪棚通风降温,猪场通风降温,猪舍风机,养殖地沟风机,猪舍地沟风机,猪舍多少台风机,厂房多少台风机,车间多少台风机,猪舍什么风机好,厂房什么风机好,车间什么风机好,多少平方水帘,多大的风机,哪个型号的风机 相关的主题文章:

